| 技术指标Performance Parameters | 单位Unit | MDR-160-050 | MDR-160-060 | MDR-160-080 | MDR-160-100 |
| 连接方式Coil Configuration |
| S | S | S | S |
|
| 连续转矩Continuous Torque | N.m | 4.0 | 8.0 | 14.0 | 21.0 |
|
| 连续电流Continuous Current | Arms | 3.5 | 3.5 | 10.0 | 10.0 |
|
| 峰值转矩Peak Torque | N.m | 13.0 | 25.0 | 42.0 | 63.0 |
|
| 峰值电流Peak Current | Arms | 11 | 11 | 30 | 30 |
|
| 最大连续功耗Max Continuous Power | W | 20.5 | 39 | 55 | 76 |
|
| 电机常数Motor Constant | N.m/√W | 0.9 | 1.3 | 1.9 | 2.4 |
|
| 转矩常数Force Constant | N.m/A rms | 1.14 | 2.3 | 1.4 | 2.1 |
|
| 反电势常数(ptp)Back EMF Constant | Vpk/rad/s | 0.7 | 1.3 | 0.8 | 1.2 |
|
| 电阻(ptp)Terminal Resistance | Ω(25°C) | 1.1 | 1.6 | 0.3 | 0.4 |
|
| 电感(ptp)Inductance | mH | 2.3 | 3.2 | 0.6 | 0.8 |
|
| 电气时间常数Electrical Time Constant | ms | 2 |
|
| 分辩率Resolution | Line/rev | 16384 |
|
| 极数Number of poles | mm | 30 |
|
| 最高绕组温度Max Coil Temperature | ℃ | 100 |
|
| 转动惯量Rotor Inertia | ×10-3Kg.m2 | 1 | 2 | 2 | 2 |
|
| 定位精度Accuracy | arc sec | ±10 | ±10 | ±10 | ±10 |
|
| 重复定位精度Repeatability | arc sec | ±2 | ±2 | ±2 | ±2 |
|
| 轴向跳动Axial runout | um | 20 | 20 | 20 | 20 |
|
| 径向跳动Radial runout | um | 20 | 20 | 20 | 20 |
|
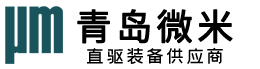
| 外径Table diameter | mm | 160 |
|
| 高度 H Table height H | mm | 50 | 60 | 80 | 100 |
|
| 电机重量Table Mass | kg | 3.5 | 5 | 7 | 9 |
|